All projects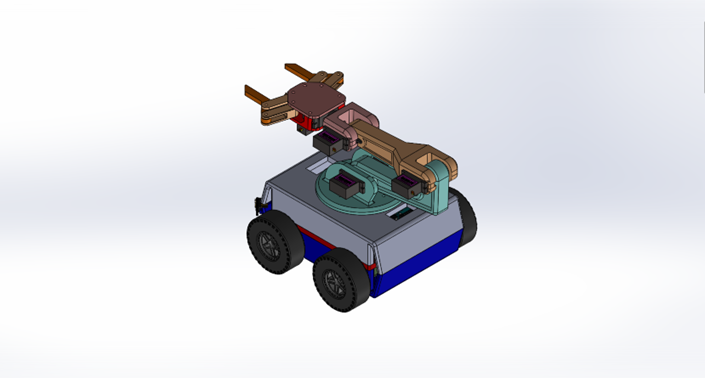
MECHATRONICS3-Phase Course Project · 4 months · 2025
Autonomous Delivery Rover
Autonomous delivery rover — chassis CAD, motor sizing, torque analysis, and full system integration and testing.
Role
Mechanical Lead
Duration
3-Phase Course Project · 4 months · 2025
Team
Team of 3 (Mechatronics Engineering Students)
/Problem
Design an outdoor delivery rover capable of carrying a 5 kg payload over uneven terrain with a target run-time of >1 hours on a single battery.
/Approach
- 01Performed motor sizing using a worst-case torque budget (incline, payload, rolling resistance) with an appropriate safety factor.
- 02Modelled the chassis in SolidWorks with a modular electronics tray and serviceable drivetrain design.
- 03Selected drivetrain components and validated structural stress concentrations on suspension brackets using FEA.
- 04Bench-tested motor current draw against predicted loads and optimized gear ratios accordingly.
/Results
- Achieved the 5 kg payload target with >25% torque margin.
- Validated run-time of 1.4 hours under mixed-terrain duty cycles.
- Enabled chassis serviceability in <10 minutes for battery and electronics replacement.